Isolations-/Trennverstärker (HCNR200)
Inhaltsverzeichnis
-
1. Einleitung
2. Zwei Methoden zur PWM-Erzeugung
3. Quasidiskreter induktiver Isolationsverstärker
4. HAUPTTHEMA: Isolationsverstärker mit dem linearen Optokoppler HCNR200
5. Sicherheit
6. Ausblick, digitale Systeme
1. Einleitung
Isolationsverstärker - auch als Trennverstärker bezeichnet - kommen dann zur Anwendung, wenn Potentialtrennung, z.B. wegen Personenschutz gefordert sind. Da die Elektromyographie (EMG) in meinen Elektronik-Minikursen über analoge Schaltungstechnik oft im Fokus steht, ist das Thema Isolationsverstärker unbedingt notwendig und wichtig. Eine Lücke, die nicht fehler darf.

Diese vereinfachte Funktions-Schaltung zeigt den längst etablierten
integrierte Isolationsverstärker aus dem Datenblatt des
ISO121.
Zur galvanisch getrennten Signalübertragung dienen zwei hochisolierende
integrierte Kapazitäten mit je nur einem Picofarad. Die daraus
resultierenden sehr niedrigen Erdableitströme und die hohe
Isolationsfestigkeit garantieren eine sehr hohe Probanden- und
Patientensicherheit. Elektronik von hoher Qualität und vom Feinsten.
Deshalb auch nicht gerade billig und genau das dürfte auch der Grund
sein, warum der ISO121 nicht mehr oder unsicher im Handel ist.
Festgestellt habe ich dies Ende 2012 oder Anfangs 2013.
Wenn man nicht unbedingt mit Kanonen auf Spatzen schiessen will, geht es
auch preiswerter mit linearen Optokopplern. Für die Präzision bei
EMG-Anwendungen reicht es mit solchen ICs längst und es sind wesentlich
preisgünstigere Isolationsverstärker. Nachteilig ist, dass man selbst
etwas Elektronik bauen muss. Die Untersuchung eines solchen hochlinearen
analogen Optokopplers habe ich selbst vorgenommen und bis zu einer
funktionsfähigen Schaltung entwickelt. Diese Schaltung nennt sich
Experimentierschaltung (Bilder 6 und 7) im Kapitel 4. Sie kann
einerseits mit der vorliegenden Dimensionierung eingesetzt werden. Man
ist aber auch frei weitergehend damit experimentieren, bevor eine eigene
Schaltung als fertiges Produkt zum Einsatz kommt. Hier die Schaltung des
HCNR200.
Es ist hier oft von der Elektromyographie (EMG) die Rede. Es geht dabei
um die Messung von intramuskulärem EMG. Dies geschieht mit Nadeln oder
mit beinah haarfeinen mit Teflon isolierten Drähten aus rostfreiem
Stahl. Die Frequenzbandbreite dieser EMG-Signale ist deutlich höher als
bei EMG-Messungen via Haut-Kontaktelektroden. Mehr dazu im Abschnitt
PWM-Demodulator.
Bevor ich zum Thema mit dem HCNR200 komme, zeige ich eine induktiv
gekoppelte Anwendung aus den 1980er-Jahren, die auch heute noch, mit
vielleicht auch ganz andern Anwendungen, durchaus Sinn machen kann. Die
galvanisch isolierte Übertragung erfolgt mit einem kleinen
Ferrit-Ringkern-Trafo.
{kind=link}
2. Zwei Methoden zur PWM-Erzeugung
Will man einen induktiv gekoppelten Isolationsverstärker realisieren, geht das nur mit Wechselspannungssignalen. Eine gängige Methode ist die Impulsbreitenmoduation (PWM) mit steilflankigen Rechteckspannungen. Der momentane Tastgrad - fälschlicherweise oft als Tastverhältnis bezeichnet - repräsentiert die momentane analoge Eingangsspannung einer PWM-Schaltung. Im Elektronik-Minikurs RAINBOW, der elektronische Batterie-Indikator wird an einem praktischen Beispiel illustriert, wie eine PWM-Schaltung mit Dreieckspannung und Komparator funktioniert. Man lese dazu das kurze Kapitel "Das RAINBOW-Funktionsprinzip". Hier in Bild 1 wird diese PWM-Methode ebenfalls, aber nur kurz, erklärt:
Auch hier gilt, wie in jedem abgetasteten System, das Abtastkriterium
(Nyquist-Kriterium). Dieses beinhaltet, dass die Abtastfrequenz
mindestens doppelt so hoch sein muss, wie die Bandbreite der
Signalfrequenz. In der Realität sollte diese Abtastfrequenz jedoch
besser zehn mal so hoch sein wie die Signalfrequenz. Es darf aber auch
mehr sein. Damit erreicht man eine relativ kleine Rippelspannung im
demodulierten PWM-Signal. Dieses analoge Signal wird mit einem aktiven
Tiefpassflter, durch die Erzeugung von Mittelwerten aus den PMW-Pegeln,
gebildet und es glättet die überlagerten Rippelspannungen, die durch die
Abtastung entstehen. Ein solches Tiefpassfilter hat daher eine
Doppelfunktion. Einerseits als PWM-Demodulator und anderseits als so
genanntes Smoothing-Tiefpassfilter. Diese Filtereigenschaft setzt man
auch am analogen Ausgang eines DA-Wandlers ein. Weil der DA-Wandler
bereits ein analoges Signal liefert, müssen noch noch die Rippelwerte
geglättet werden. Ob Glättung oder Mittelwertbildung, beides ist
prinzipiell das selbe. Es kommt ein Tiefpassfilter zum Einsatz. Mehr
dazu im Abschnitt PWM-Demodulator.
Falls dieser Abschnitt nicht ausreichend verständlich ist, empfehle ich
für den Einstieg die folgende WWW-Seite:
Die Abtastfrequenz in Teilbild 1.1 betrifft die Dreieckspannung und in
Teilbild 1.2 die Taktspannung. In Teilbild 1.2 gilt, die steigende
Flanke der Taktspannung tastet den momentanen Wert der verstärkten
EMG-Spannung ab. Die "Abtastung" in Teilbild 1.1 erfolgt immer dann,
wenn die Dreieckspannung die EMG-Spannung gerade über- oder
unterschreitet. Mit diesem Vorgang alleine entsteht auch schon das
PWM-Signal und dies in der Weise, dass die steigende und die fallende
Flanke sich zeitlich verschieben. Ganz anders in Teilbild 1.2. Die
steigende Taktflanke löst die Funktion des Monoflop aus. Der Ausgang
geht auf logisch HIGH. Die Impulsdauer wird mit jedem Takt durch die
variable Zeitkonstante IT*CT bestimmt. IT ist eine spannungsgesteuerte
Stromquelle. Die Höhe dieses Stromes und die daraus resultierende
Impulsdauer wird durch die momentane EMG-Spannung bestimmt. Dabei
verschiebt sich zeitlich nur die fallende Flanke des PWM-Signales. Dies
beeinträchtigt die PWM-Funktion nicht. Der momentane Tastgrad ist ebenso
eine direkte Folge aus der momentanen EMG-Spannung. IT bedeutet
Timing-Stromquelle und CT Timimg-Kondensator.
Hinweis 1: Die Signalbilder EMG- und Dreiecksignal (Teilbild 1.1)
und EMG- und Taktsignal (Teilbild 1.2) vor den Eingängen, haben nur
einen symbolischen Charakter. Die Frequenzverhältnisse stimmen nicht.
Hinweis 2: Anstelle einer Dreieckspannung kann man ebenso eine
Sägezahnspannung verwenden. Das kommt u.a. darauf an, wie hoch die
Dreieckfrequenz sein muss, die schliesslich abhängig ist von der
Bandbreite des Nutzsignales. Je höher die Dreieckfrequenz ist, um so
schwieriger wird es die Dreieckspannung mit einem Opamp und einem
Komparator möglichst linear zu erzeugen. Es kann auch teuer werden, wenn
man sehr schnelle Bauteile einsetzen muss. Nicht nur die
Unity-Gain-Bandbreite, auch die Slewrate bestimmt die maximale Frequenz.
Die Slewrate hauptsächlich bei grossen Signalamplituden. Die Erzeugung
einer Sägezahnspannung mit linearem Anstieg kann einfacher und
vielleicht weniger aufwändig realisiert werden. Wie man einen
Dreieckgenerator realisiert, zeigt dieser Elektronik-Minikurs:
Ein Sägezahngenerator gibt es noch nicht in meinen Elektronik-Minikursen. Will man einfach mal Schaltungen mit Sägezahngeneratoren sehen, bemühe man GOOGLE-Bilder.
3. Quasidiskreter induktiver Isolationsverstärker

Das Blockschema in Bild 2 verwendet zur Erzeugung des PWM-Signales die
Schaltung aus Teilbild 1.2. Das aktive Tiefpassfilter vor dem
Impulsbreiten-Modulator (PWM-Modulator) unterdrückt Aliasing-Effekte,
die dann auftreten, wenn das Signal (z.B. auch ein überlagertes
Störsignal) an Ue Frequenzanteile enthält, die höherfrequenter sind als
die halbe Frequenz des Taktsignales. Wenn solche Signale nicht
gefiltert werden, werden die höheren Frequenzanteile teilweise in den
Nutzfrequenzbereich gefaltet. Es erscheinen dann Signalanteile die es in
Wirklichkeit gar nicht gibt. Mehr dazu liest man im Elektronik-Minikurs
Das SC-Filter, eine kurze Einführung
im Kapitel "Nyquist, Shannon und der Wilde Westen".
Für die isolierte Übertragung von Impulsen eignet sich ein kleiner
Ferrit-Ringkerntrafo. Es geht nur darum, dass die steilen Impulsflanken
sauber übertragen werden. Die Information des analogen Signales vom
Eingang Ue liegt nur im Tastgrad der PWM-Impulse und nicht etwa in der
Amplitude und deren Form an dieser Stelle der Schaltung. Für eine
EMG-Anwendung braucht es mindestens eine Isolationsspannung von 4 kV
zwischen den Wicklungen, wie üblich für elektromedizinische Geräte, an
denen Patientenkontakt besteht. Der Abstand der beiden Spulen, sowie die
Abstände zwischen Primär- und Sekundäranschlüssen müssen mindestens 8 mm
(Kriechstrecke), bzw. 5 mm (Luftstrecke) betragen.
Die Impulsaufbereitung (PWM-Restore) sorgt dafür, dass am Ausgang dieses
Schaltungsteiles wieder das selbe PWM-Signal erscheint, wie am Ausgang
des PWM-Modulators. Ein Tiefpassfilter am Ausgang des PWM-Modulators
mittelt das PWM-Signal mit den unterschiedlichen Tastgraden zum analogen
Signal, dessen Signalmuster an Ua dem des Ue entspricht. Die
Funktionsweise dieses Tiefpassfilters bezeichnet man bei dieser
Anwendung sinngemäss auch als PWM-Demodulator.
Bild 3 zeigt die vollständige Schaltung des PWM-Modulator und des
PWM-Restore. An Stelle des üblichen Widerstandes kommt hier mit dem
Transistor T2 eine steuerbare Stromquelle zum Einsatz. T1 arbeitet als
Diode und dient der Kompensation des Temperaturdriftes von T2. Der
beste Arbeitspunkt wird mit dem Trimmpot P2 eingestellt, der dafür
sorgt, dass der Klirrfaktor (THD) am Ausgang des PWM-Demodulator (Bild 5)
minimal ist. Mit dem Trimmpot P1 (GAIN) wird die Empfindlichkeit des
PWM-Modulators, bzw. die Verstärkung der gesamten Schaltung, inklusive
des PWM-Demodulators, eingestellt. IC:B ist ein Dual-Monoflop, geeignet
für sehr kurze Monoflop-Zeiten. Man kann ihn sogar einsetzen bis in den
Bereich von wenigen 100 ns. IC:A dient als Taktgenerator mit einer
Frequenz von 500 kHz. Das zweite NAND-Schmitt-Trigger-Gatter dient als
Buffer, damit eine Belastung am Ausgang keinen rückwirkenden Einfluss
auf die Generatorschaltung hat. Mit dem Ausgang beim Buffer kann man das
Taktsignal leicht für weitere Kanäle einsetzen.
Ferrit-Ringkerntrafo: Leider habe ich da nur noch eine Angabe.
Das ist die magnetische Permeabilität µe von 100 oder mehr. Der äussere
Durchmesser des Kernes beträgt etwa 20 bis 30 mm
(Isolationsfestigkeit!). Das Wicklungsverhältnis ist 1:2. Angaben über
Windungszahlen finde ich leider nicht mehr. Bei allfälligem
(Hobby-)Nachbau, muss man einfach darauf achten, dass die schmalen
Impulse auf der Sekundärseite eine Amplitude haben müssen, dass diese in
der nachfolgenden PWM-Restore-Schaltung korrekt verarbeitet werden
können. C6 ist nötig zur Strombegrenzung, weil die Trafo-Impedanz nur
gerade im Moment der steilen Flanken genügend hoch ist. Während dem
HIGH-Pegel würde ohne C6 IC:B zu stark belastet. R6 dient der Dämpfung,
damit C6 mit der Primärspule keine nennenswerte Resonanz
(Saugkreis-Effekt) bildet. R7 dient als ohmsche Belastung mit dem selben
Dämpfungszweck. Mit diesen Angaben wird man spielen müssen...
PWM-Restore: Da IC:C nur mit maximal 15 VDC (Absolute Maximum
Rating = 18 VDC) gespiesen werden darf, wird die Betriebsspannung für
IC:C mit den beiden Zener-Dioden Z1 und Z2 auf ±6 VDC reduziert. Ein
Schmitt-Trigger-NAND-Gatter dieses IC:C wird für die Funktion des
PWM-Restore benötigt. Die restlichen drei Gatter werden nicht gebraucht.
Ihre Eingänge muss man entweder auf +6 VDC oder -6 VDC schalten. Mit R9
und R10 werden die beiden Eingänge auf etwa GND-Niveau gehalten.
Allerdings unterliegen die Triggerspannungen der
Schmitt-Trigger-Hysterese der Exemplarstreuung. Wäre der GND-Pegel
ideal, würde zwischen den Eingängen und GND ein Widerstand genügen. So
aber muss man, um "saubere" Impulse am Ausgang zu bekommen, leichte
Anpassungen vornehmen. Deshalb die Unterschiede zwischen R9 und R10. Es
ist klar, dass sich so etwas nur für wenige Einzelanfertigungen lohnt.
Allerdings stellte ich damals fest, dass ich für ICs aus der selben
Chip-Produktion die selben R9- und R10-Werte einsetzen konnte. Es ging
damals um vier Einheiten. Bei einem positiven Nadelimpuls wird der
Ausgang des Schmitt-Trigger-Gatters auf LOW (-6V) und bei einem
negativen auf HIGH (+6V) gesetzt.
Warum setzen positive Impulse den Ausgang von IC:C auf LOW und negative
Impulse auf HIGH. Ganz einfach, der Spannungs-Arbeitspunkt am
Schmitt-Trigger-Eingang liegt innerhalb der Hysterese während des
Ruhezustandes. Übersteigt die Spannung des positiven Impulses den Wert
der positiven Triggerspannung, geht der Ausgang auf LOW und das Ganze
umgekehrt.
Grenzen des Möglichen: Bild 1 zeigt zwei Methoden zur Realisierung einer
PWM. Die Methode mittels Dreieckspannung und Komparator und die Methode
mit Monoflop. In beiden Anwendungen genügt es nicht, das nur das
Abtastkriterium eingehalten wird. Aus der Praxis weiss man, dass die
Dreieckfrequenz (Teilbild 1.1) oder die Taktfrequenz (Teilbild 1.2)
mindestens 10 mal grösser sein sollte, als die maximalen Frequenzanteile
im Spektrum des Nutzsignales (hier EMG). Dies ist bereits weiter oben
angedeutet. Mit dem Monoflop MC14528 oder CD4528 funktioniert das,
richtig abgestimmt mit P2 in Zusammenhang mit der restlichen
Dimensionierung um T1 und T2 (Bild 3) sehr gut. Mit THD
(Total-Harmonic-Distortion) ist hier alleine der Klirrfaktor gemeint.
Dieser liegt bei einer Signalfrequenz von 10 kHz bei 0.36 % und dessen
Temperaturstabilität bei 0.01 %/K. Warum gerade 10 kHz? Erklärung siehe
Abschnitt "PWM-Demodulator". Die Temperaturstabilität der
Gesamtverstärkung beträgt 0.012 %/K. Das gilt für die vier Exemplare die
ich damals untersucht habe. Die Frequenz-Bandbreite wird durch die
Nachfolgeschaltung PWM-Demodulator, bestehend aus einem aktiven
Tiefpassfilter 4. Ordnung mit einer Grenzfrequenz von 40 kHz definiert.
Die Klirrfaktor- (THD) und Verstärkungwerte werden am Ausgang dieses
Filters (PWM-Demodulator) gemessen. Dies geht schliesslich nicht direkt
am PWM-Signal. Mehr zum Thema dieses Filters, siehe Abschnitt
"PWM-Demodulator" mit Bild 5.
Das Problem ist, man weiss nicht so recht wie lange es die beiden
Dual-Monoflops MC14528 und CD4528 noch geben wird. Kürzlich (02.2013)
entdeckte ich den MC14528 im DIP16- und im SOIC16-Gehäuse bei Farnell
(RoHS-Zertifikat). Die Alternative MC14538 und CD4538 sind, weil zu
langsam, nicht geeignet. Dafür erreicht man mit diesen Monoflops sehr
grosse Impulszeiten und die Impulszeit entspricht präzise der
RC-Zeitkonstante. Die trifft auf die beiden MC14528 und CD4528 nicht zu.
Eine weitere Alternative besteht darin, den PWM-Modulator nach dem
Prinzip von Teilbild 1.1 zu realisieren. Experimente haben mir gezeigt,
dass bei relativ hohen Dreieckfrequenzen sehr schnelle Komparatoren zum
Einsatz kommen müssen. Der handelsüblichen Komparator TLC3702 (LinCMOS)
mit einer Verzögerungszeit von 2.7 µs und eine Dreieckfrequenz von
maximal 10 kHz ist gerade noch zulässig. Schon bei dieser Frequenz zeigt
sich beim Rechtecksignal am unbelasteten Ausgang des Komparators Ua eine
leichte Abweichung des 50%-Tastgrades, wenn das Dreiecksignal auf GND
bezogen triggert. Das entspricht dem Zustand, wie wenn am Eingang Ue des
PWM-Modulator eine kleine Spannung und nicht GND anliegt. Es zeigen sich
auch Unterschiede in den Flankensteilheiten bei der steigenden und
fallenden Flanke des Rechtecksignales an Ua. Bild 4 illustriert ein
Beispiel mit einer Dreieckspannung mit 50 kHz. Für eine saubere
PWM-Verarbeitung empfiehlt sich eine maximale Dreieckfrequenz von nur
gerade 7 kHz. Damit lässt sich ein Nutzsignal mit einer
Frequenzbandbreite von etwa maximal 700 Hz vernünftig verarbeiten.
Estrapolieren wir das auf die Frequenzbandbreite der Schaltung in Bild 3
und Bild 5 mit 40 kHz, müsste man für die Dreieck/Komparator-Methode
einen Komparator mit einer Verzögerungszeit von weniger als 50 ns
einsetzen müssen. Eine Dreieckspannung muss mit einer Frequenz von 500
kHz ein perfektes PWM-Signal liefern. Solche Komparatoren gibt es
durchaus, jedoch ist die Schaltungstechnik keineswegs leicht. Man
braucht einiges an HF-Erfahrung im Design solcher Schaltungen, damit sie
stabil arbeiten. Ein Versuchsaufbau mit einem Steckboard eignet sich
ganz sicher nicht wegen viel zu hohen parasitären Kapazitäten und
Induktivitären (Drähte)!
Keine Umwege: An diesem Punkt angelangt, stellt sich quasi von
alleine die Frage, ob es denn nicht auch ohne den Umweg eines getasteten
Systems geht. Nämlich mit einer analogen Signalübertragung durch die
galvanisch isolierte Schnittstelle. Diese Möglichkeit gibt es mit dem
linearen Optokoppler HCNR200 von AVAGO. Mehr dazu im nächsten Kapitel.
Zunächst beenden wir das vorliegende Thema mit dem PWM-Demodulator,
vorgestellt in Bild 5:
PWM-Demodulator:
Bild 2
zeigt das Blockschaltbild. Wir kommen jetzt zum letzten Teil, zum
PWM-Demodulator, bestehend aus einem aktiven Tiefpassfilter, wie dies
Bild 5 zeigt. Es ist ein Butterworth-Tiefpassfilter vierter Ordnung mit
einer Steilheit im Grenzfrequenzbereich von 24 dB/Oktave und einer
Grenzfrequenz von 40 kHz. Mit dieser Filterordnung erreicht man eine
exzellente Dämpfung der Rippelspannung. Diese Bandbreite von 40 kHz
benötigt es selbstverständlich auch dann nicht, wenn man intramuskuläres
EMG messen will. Zur guten Wiedergabe von Aktionspotentialen sind
bereits 10 kHz genügend. Das Tiefpassfilter in Bild 5 hat nur deshalb
einen viel höheren Wert, damit die Schaltung des Isolationsverstärkers
universeller ist. Es ist auch keineswegs ausgeschlossen, dass nicht
höhere Bandbreiten der Frequenz erwünscht sind bei der Messung von
intramuskulärem EMG. Das kommt auch sehr auf die Inhalte eine
Forschungsprojektes an. Anderseits ist der Anwender auch frei diese
Bandbreite zu reduzieren. Der Vorteil davon ist geringere
Rauschspannung. Ich erreichte damals diesen Effekt mit zusätzlichen
SC-Tiefpassfiltern mit
umschaltbaren Grenzfrequenzen mit sehr hohen Steilheiten im Bereich der
Grenzfrequenz von 100 dB/Oktave. Dies für den Zweck von nachgeschaltetem
Multiplexer und AD-Wandler zur Vermeidung von Alias-Effekten. Was der
Sinn dieser hohen Filtersteilheiten ist, ist ausführlich beschrieben im
soeben genannten Elektronik-Minikurs.
Andere Werte der Grenzfrequenz des Tiefpassfilters in Bild 5 erreicht
man am einfachsten durch das proportionale Anpassen der vier gleich
grossen Widerstände R1 bis R4. C1 bis C4 muss man proportional nur dann
zusätzlich anpassen, wenn R1 bis R4 bei einer wesentlich niedrigeren
Grenzfrequenz sehr gross werden. Für eine genaue Berechnung empfiehlt
sich passende Literatur (z.B. HALBLEITER-SCHALTUNGSTECHNIK
Tietze/Schenk) oder ein Filterberechnungsproramm.
Das passive Hochpassfilter mit anschliessendem Spannungsfolger IC:A3
dient der DC-Entlopplung. IC:A1 und IC:A2 erzeugen nur einen
bescheidenen Beitrag im mV-Bereich, da die DC-Verstärkung jeweils nur 1
beträgt. Anders sieht es beim PWM-Demodulator (Bild 4) aus. Da kann es
leicht einiges mehr sein. Wenn jedoch nur AC-Signale übertragen werden,
genügt ein einfaches Hochpassfilter mit entsprechend niedriger
Grenzfrequenz. Im vorliegenden Beispiel sind es 0.8 Hz. Das passive
Spike-Tiefpassfilter eignet sich dann, wenn als Folge einer komplexen
Gesamtschaltung von steiltransienten Störquellen (Schaltnetzteile) feine
Nadelimpulse auftreten. Für C1 bis C4 sollte man hochwertige
Styroflex-Kondensatoren mit einer Kapazitätstoleranz von 1% einsetzen.
Für C5 eignet sich ein Keramik-Kondensator. Allerdings nur, weil an
dieser Stelle der AC-Spannungspegel hoch genug und so der Störabstand zu
den Piezo-Spannungen gross genug ist. Piezo-Spannungen entstehen durch
mechanische Einwirkungen auf die Keramik-Kondensatoren. Für C6 muss es
ein Keramik-Kondensator sein, damit dieser möglichst keine parasitäre
Induktivität aufweist. Sonst verfehlt er seinen Zweck. Möglicherweise
muss man C6 nahe beim Anschluss oder nahe bei der folgenden Schaltung
platzieren, weil sonst die Leitung bis zum C6 als Empfangsantenne wirken
kann.
4. Isolationsverstärker mit dem linearen Optokoppler HCNR200
Der lineare Optokoppler hat einen signifikanten Vorteil. Es wird nichts
abgetastet und so kann es auch keine Aliaseffekte geben, gegen die man
etwas unternehmen muss, wie weiter oben beschrieben. Zentraler Baustein
ist der hochlineare Optokoppler
HCNR200
von der Firma
AVAGO-Technologies.
Wir werfen zunächst ein Blick in das
HCNR200-Datenblatt.
Dazu ein paar einführende Informationen. Es gibt zwei ICs, den HCNR200
und den HCNR201. Es gibt zuviele Unterschiede um hier einzeln darauf
einzugehen. Es fällt auf, dass gewisse Toleranzen in den Spezifikationen
kleiner sind beim HCNR201. Ob diese im Einzelfall relevant sind oder
nicht, muss der Entwickler selbst abklären. In der
AVAGO-Application-Note 1357
fällt auf, dass im Text der HCNR201 und in den Schemata dazu der HCNR200
erwähnt wird. Zu den Package-Infos auf Seite 3 des Datenblattes erkennt
man, dass der Breitenabstand der Dual-Inline-Anschlüsse mit einem
Abstand von 10.16 mm um 2.54 mm grösser ist, als üblich. Dies um einer
grösseren Kriechstrecke gerecht zu werden, die einer Spannung von 5
kV_rms während einer Minute Dauer entsprechen muss. Es gibt noch weitere
detailliertere Informationen zu diesem Thema im Datenblatt auf Seite 6.
Einen speziellen Beitrag von AVAGO zum Thema Hochspannungs-Isolation von
Optokopplern liest man
hier
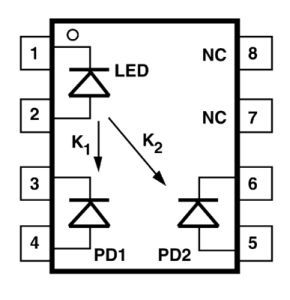
im Kapitel "Hochspannungssicherheit". Die Ursache zur Präzision
solcher hochlinearen analogen Optokoppler besteht darin, dass einerseit
von einer Infrarot-Sendediode (LED) das optische Signal durch die
Isolationsbarriere zu der einen (PD2) und anderseits direkt zu einer
benachbarten Infrarot-Empfangsdiode (PD1) als Feedbacksignal übertragen
wird. Man beachte dazu die Basic-Topology und die
Practical-Circuit auf Seite 11 des Datenblattes. Der
HCNR200 und HCNR201 gibt es bei Farnell für nur 3.65 Euro, bzw 4.04 Euro
(Einzelstück) bei relativ grosser Lagerhaltung (01.2013).
Application-Notes, was nun: Wenn man beginnen möchte mit dem
HCNR200 einen Isolationsverstärker zu realisieren, sieht man sich erst
mal die vielen
AVAGO-Application-Notes
an und überlegt sich was wohl taugen wird und mit welchem Angebot man
den Anfang machen will. Ich begannn sogleich mit Figur 3 auf Seite 3.
Ich dachte mir, dass diese Schaltung das beste Resultat liefern würde,
denn sie ist spannungssymmetrisch aufgebaut und das passt ganz bestimmt
zu einer Betriebsspannung mit ±Ub. Die Messungen an V_OUT zeigte jedoch
ein stark verzerrtes Signal. Ich tauschte die beiden LM158 (LM358) gegen
zwei TL071. Viel besser wurde es auch nicht, trotz diversen Versuchen
und Änderungen an der bestehenden Dimensionierung. Ich fand heraus, dass
die Schaltung in Figure 1 sich am besten eignet, wenn man sie den
eigenen Anforderungen entsprechend anpasst. Dabei kann man den LM158
(LM358) am besten gleich vergessen, ausser man begnügt sich mit einer
sehr niedrigen Frequenzbandbreite des zu verabeitenden Signals. Ich habe
diesen Opamp für ±5VDC-Anwendung durch den TLC271 (LinCMOS) und für
±12VDC- und ±15VDC-Anwendungen durch den TL071 ersetzt. Falls der TLC271
(±5VDC-Anwendung) zum Einsatz kommt, muss dieser auf den High-Bias-Mode
geschaltet werden. Pin 8 mit Pin 4 verbinden.Die Werte für die
Gegenkopplungs-Kondensatoren sind mit 100 pF viel zu hoch, diese mussten
durch signifikant niedrigere Kapazitäten ersetzt werden. Damit kommen
wir jetzt zur fast vollständigen Schaltung in Bild 6:
Grenzfrequenz und maximale Ausgangsspannung: Ubx = Ub = ±5V C1 = 15 pF C2 = 15 pF R5 = 560 Ohm (4mA): fg (-3dB) = 30 kHz Ua_max = 8 Vpp Ubx = Ub = ±12V C1 = 10 pF C2 = 5.6 pF R5 = 820 Ohm (7mA): fg (-3dB) = 50 kHz Ua_max = 16 Vpp Ubx = Ub = ±12V C1 = 10 pF C2 = 5.6 pF R5 = 470 Ohm (7mA): fg (-3dB) = 80 kHz Ua_max = 16 Vpp Ubx = Ub = ±15V C1 = 10 pF C2 = 5.6 pF R5 = 1 k-Ohm (9mA): fg (-3dB) = 45 kHz Ua_max = 24 Vpp Ubx = Ub = ±15V C1 = 10 pF C2 = 5.6 pF R5 = 560 Ohm (10mA): fg (-3dB) = 70 kHz Ua_max = 24 Vpp Stromverbrauch: Dieser ist abhängig von den verwendeten Opamps, Strom von Z1 und Z2 und vom Strom der LED im HCNR200. Die gesamte Schaltung (Bild 7), Opamps = TL071 bei ±Ub=±Ubx=±12VDC: +Ibx < 15 mA +Ib < 5 mA -Ibx < 15 mA -Ib < 10 mA Rauschen: Rauschspannung am Ausgang, Ue (Bild 6) mit GNDx kurzgeschlossen: 140 µVrms (LowPass = 10 kHz) 180 µVrms (LowPass = 20 kHz) * 300 µVrms (LowPass = 100 kHz) 1.2 mVrms (no LowPass ~ 1 MHz) * Rauschspannungsdichte = ca 1.3 µV/sqrt(Hz). Vergleich: ISO121 = 4 µV/sqrt(Hz)
Grenzfrequenz und maximale Ausgangsspannung: Die maximale
Ausgangsspannung (Spitzenwerte Vpp) gelten unterhalb der Grenzfrequenz
bei der die Spannung um 3 dB (Faktor = 0.71) reduziert ist. Die maximale
Vpp-Spannung wird alleine durch ±Ubx, ±Ub und durch die
Aussteuereigenschaft der gesamten Schaltung definiert. Es ist die
Slewrate, welche die maximale Frequenz bei einer gegebenen maximalen
Vpp-Spannung definiert. Eine Slewrate-Definition gibt es im
HCNR200-Datenblatt nicht. Die LED-Bandbreite beträgt 9 MHz bei einem
Strom von 10 mA, jedoch die Fotodioden sind betreffs maximaler Frequenz
nicht spezifiziert. Es gibt nur betreffs der beiden Applikationen von
Figure 16 und 17 zwei Werte für die Frequenz-Bandbreite in
"AC-Electrical-Specifications". Die Slewrate der
vewendeten Opamps sind wesentlich höher, als die der ganzen Schaltung in
Bild 6 und 7. Wir haben hier Freuqenzbandbreiten zwischen 30 kHz und 80
kHz. Dies allerding mit TL071 mit einer Slewrate von 13 V/µs
entsprechend einer Frequenzbandbreite von 172 kHz bei einer Spannung von
24 Vpp (±Ubx = ±Ub = ±15 VDC) und mit TLC271 mit einer Slewrate von 3.6
V/µs entsprechend einer Frequenzbandbreite von 143 kHz bei einer
Spannung von 8 Vpp (±Ubx = ±Ub = ±5 VDC). Im Vergleich dazu hat ein
LM158 (LM358) mit einer Slewrate von gerade 0.6 V/µs eine
Frequenzbandbreite von 8 kHz bei einer Spannung von 24 Vpp (±Ubx = ±Ub =
±15 VDC). Dazu kommt, dass der LM158 (LM358) und der schaltungsgleiche
LM124 (LM324) bei bereits viel niedrigeren Frequenzen eine signifikante
Übernahmeverzerrung aufweist, weil offenbar der Querstrom der Endstufe
zu schwach dimensioniert ist. Ich übertreibe nicht, diese Opamps,
inklusive den 741er, als Steinzeit-Opamps zu bezeichnen, wobei das nicht
bedeutet, dass man diese für gar nichts einsetzen kann. Es kommt eben
ganz auf die Anwendung an.
Betriebsspannungen: ±Ubx und ±Ub sind klar getrennte
Betriebsspannungen, trotz der =-Zeichen im Text. ±Ubx (x=external) ist
die Betriebsspannung für den linken isolierten Teil der Schaltung. Mit
±Ubx kann zusätzlich auch ein (EMG-)Vorverstärker gespeist werden. Um
eine gute Stabiltät der mit dem Trimmpot P kompensierten
DC-Offsetspannung zu erzeugen, sollten für ±Ubx und ±Ub je eine stabile
geregelte DC-Spannung eingesetzt werden. Der LM317(L) und LM337(L)
eignen sich dafür. Der Strom in Klammer nach dem R5-Wert, ist der Strom
der durch die IC-integrierte Infrarot-LED und durch R5 fliesst.
Stabilität: C1 und C2 sind sehr kleine Kapazitäten, vorzugsweise
Keramik-Kondensatoren. Die angegebenen optimalen Werte beziehen sich auf
den Testaufbau auf einem Steckboard. Ein richtiges Printlayout hat
kleinere parasitäre Kapazitätswerte. Es kann deshalb sein, dass man für
C1 und C2 etwas höhere Werte nehmen muss. Die Stabiltät der Schaltung
testet man am besten mit einem Rechtecksignal am Eingang Ue. Sind C1 und
C2 optimal, gibt es am Ausgang Ua gerade noch keine Überschwinger
(maximale Dämpfung aperiodischer Schwingungen). Wie genau eine solche
Messung zu verstehen ist, liest man im Elektronik-Minikurs
Vom Operationsverstärker bis zum Schmitt-Trigger...
im Kapitel "Test der Stabilität" mit Bild 8. Es geht hier um die
Erklärung der Frequenzgang-Kompensation.
Wozu D1 und D2? Diese Dioden gibt es in den
HCNR200-Applicationnotes von AVAGO nicht. Wenn man die Schaltung mit ±15
VDC speist, ist es durchaus möglich, dass bei einem Einschwingvorgang
sehr kurzzeitig die absolut maximal zulässige Sperrspannung der
Photodioden PD1 und PD2 von 30 V erreicht wird. Da im eingeschwungenen
Zustand einer gegengekoppelten Opamp-Schaltung die Differenzspannung am
Eingang stets (fast) 0 V beträgt, kann es nicht schaden, eine
Überspannung auf die Durchfluss-Spannung einer schnellen Si-Diode zu
begrenzen. Die Arbeitsweise der Regelschaltung wird dadurch in
keinsterweise beeinträchtigt. Eine herkömmliche 1N914 (1N4148) eignet
sich bestens. Sie hat eine Recovery-Time von 4 ns.
DC-Offset: Wie bereits erwähnt, ist es notwendig, dass ±Ub und
±Ubx gut stabilisiert sind. Dadurch ist die DC-Offsetspannung bereits
relativ niedrig und auf einem konstanten Wert. Wobei, genau genommen,
sich nur eine Änderung von -Ub und -Ubx auf die DC-Offsetspannung
auswirkt. Durch die Erweiterung mit dem DC-Offset-Abgleich mit einem
kleinen 10-Gang-Trimmpot P, R6 und R7, eingespeist am invertierenden
Eingang von Opamp IC:B, dürfen stabile Spannungen von ±Ub und ±Ubx
zueinander auch geringfügig im 100mV-Bereich konstant abweichen, weil
dies durch einen einmaligen Abgleich an P kompensiert werden kann. R6
wird nicht benötigt bei ±Ub = ±Ubx = ±5 VDC, beim Einsatz von
LinCMOS-Opamps TLC271 für IC:A und IC:B. Die beiden Zener-Dioden Z1 und
Z2 tragen, wegen leichten Zener-Spannungsunterschieden, zur
DC-Offsetspannung etwas bei. Sind beide Zener-Dioden der selben
Umgebungstemperatur ausgesetzt, kompensiert dies eine temperaturbedingte
DC-Offsetdrift. Verwendet man anstelle von Zener-Dioden Referenz-Dioden
nach dem Bandgap-Prinzip mit gleich grosser Referenzspannung von je 2.5
V, eignet sich an stelle von ZPD-2.7 ein LM385-2.5.
Wozu überhaupt Zener-Dioden und Schalter? Diese gibt es in den
AVAGO-Applicationnotes nicht. Warum also hier? Die Zenerdiode ermöglicht
eine Vorspannung zu den Opamp-Eingängen und dies erlaubt den Einsatz von
beliebigen Opamps, die keinen Commonmode-Bereich bis auf -Ub bzw. -Ubx
haben. Dies betrifft z.B. die Opamp-Familie zu dieser der TL071 gehört.
LinCMOS-Opamps, wie der TLC271 - und der alte LM158 (LM358) - verabeiten
Eingangsspannungen bis auf -Ub bzw. -Ubx). Oder eben GND(x) als GND1 und
GND2, wie in Figure 1 in den
AVAGO-Application-Notes
dargestellt. Es gelten stets GND(x) beim Einsatz von Single-Supply und
-Ub(x) beim Einsatz von Dual-Supply. Die beiden Schalter S1 und S2
kommen hier nur deshalb zum Einsatz, weil Bild 6 eine
Experimentierschaltung ist. Je nachdem, welcher Opamp final zum Einsatz
kommt, entscheidet, ob es die Vorspannung mit Zener- oder
Referenz-Dioden überhaupt benötigt. Bei der finalen Version auf einem
Print werden die Schalter S1 und S2 selbstverständlich nicht benötigt.
Wichtig: Die Bauteilnummern von Bild 6 und Bild 7 sind separiert und
nicht durchgehend!
Diese zusätzliche Schaltung in Bild 7 ergänzt die Schaltung von Bild 6
am Ein- und Ausgang. Das Verhältnis von R1 zu R2 (Bild 6) definiert das
Verhältnis von Ua zu Ue (Bild 6). Allerdings bedeutet R1 = R2 nicht
präzise Ua / Ue = 1. Trotzdem ist es wichtig, dass R1 durch eine
Signalquelle an Ue (Bild 6) nicht unnötig vergrössert wird. Darum hier
in Bild 7 die Schaltung mit dem Opamp IC:A. Benötigt man nur gerade
Verstärkung=1, kann man R2 überbrücken und R3 benötigt es nicht. In
diesem Fall muss der Opamp IC:A unity-gain-stable sein. R1 garantiert,
dass Ue (Bild 6) auf GNDx- und Ua (Bild 6) auf GND-Potential
referenziert ist, unabhängig davon ob Ue an einer Signalquelle
angeschlossen ist oder nicht (C1 überbrückt). Wenn die Signalquelle
selbst eine DC-Offset-Spannung enthält, muss man mit C1 entkoppeln. Die
Hochpass-Grenzfrequenz von C1*R1, die man den eigenen Bedürfnissen
anpassen kann, beträgt hier 1.6 Hz.
Die zusätzliche Schaltung am Ausgang von Bild 6 bietet die Möglichkeit
die Gesamtverstärkung mit Trimmpot P auf 1 (Ua/Ue) zu kalibrieren, wenn
Opamp IC:A als Spannungsfolger arbeitet. Sonst gilt für den exakten
Abgleich:
Ua = Ue * ((R2 / R3) + 1)
An drei Exemplaren des HCNR200 stellte ich fest, dass mit hochpräzisen
einprozentigen Widerständen R1 und R2 (Bild 6) mit je 330 k-Ohm, das
Verhältnis von Ua/Ue etwa 0.9 beträgt. Trotzdem ist es ungewiss, ob
diese Verstärkung nicht auch mehr als 1 betragen kann. Deshalb der
Spannungsteiler R4/R5 mit einem Teilerverhältnis von 0.91. Kalibriert zu
1 wird dies mit dem Trimmpot P (10 Gang). Falls die Schaltung in Bild 6,
bedingt durch die Exemplarstreuung des HCNR200, einen grösseren
Einstellungsbereich benötigt, erreicht man dies durch eine Reduktion der
Werte von R5 und R6. R7 vermeidet Oszillation, wenn Ua (durch eine
abgeschirmte Leitung) kapazitiv zu stark belastet wird. Dies hat den
eventuellen Nachteil, dass der Ausgang zu hochohmig ist. In diesem Fall
hilft die Schaltung Lead-Kompensation im Kapitel "Die
kapazitive Last am Ausgang des Opamp (Lead-Kompensation)" im
Elektronik-Minikurs
Operationsverstärker II.
Am besten auch gleich die beiden folgende Kapitel "Für den
Elektronik-Praktiker" und "Vereinfachung durch Lesertipp"
lesen.
Scheinbarer Widerspruch: Die Ausgangsstufe (IC:B: GAIN ADJUST)
ist von Ua (Bild 6) mit C2, R4 und R5 DC-entkoppelt. Wozu denn das, mag
sich der Leser fragen, weil die DC-Offsetspannung wird in der Schaltung
von Bild 6 kalibriert. Die DC-Offset-Stabilität erreicht nicht die eines
teuren ISO121. Darum eignet sich diese Schaltung nur bedingt zur Messung
von quasistationären Signalen (Temperatur, Druck, etc.). Dafür ist sie
hier nicht realisiert. Beim Einsatz zur Verstärkung und Verabeitung von
z.B. EMG-Signalen eignet sie sich jedoch hervorragend, weil nur
AC-Spannungen von Interesse sind. Deshalb das Hochpassfilter (C2, R4 und
R5). Die Einstellbarkeit der DC-Offsetspannung dient einzig zur
Einstellung der optimalen Signalaussteuerung von Ua (Bild 6). Ein
(EMG-)Vorverstärker, der an Ue angeschlossen wird, liefert in der Regel
bereits ein Ausgangssignal das DC-entkoppelt oder anderweitig
DC-kompensiert ist. C1 ist daher nicht zwingend nötig. R1 sollte aber
sein, weil wenn an Ue eine GNDx-referenzierte Spannungsquelle entfernt
wird, bleibt der Opamp IC:A mit R1 auf GNDx bezogen. Wegen der
symmetrischen Speisung ±Ubx und ±Ub, sind C1 und C2 nur AC-Spannungen
ausgesetzt. Deshalb eignet sich ein Elko nicht. Entweder verwendet man
einen Keramik- oder besser einen Wickelkondensator 1µF/50V mit
Rastermass = 2.5 mm), der bei dieser Kapazität für
die passend niedrige Spannung genügend klein ist. Keramik-Kondensatoren
sind kleiner, eignen sich aber nur bedingt für Signalpfade, weil sie
piezoempfindlich sind. Das gilt allerdings bei sehr kleinen Spannungen
(z.B. Mikrophon).
5. Sicherheit
Ich beziehe mich primär auf die Angaben der technischen Normen des Schweizerischen Elektrotechnischen Verein (SEV), Fachbereich Elektrotechnik "EN 60601-1+A1+A2". Es betrifft dabei die medizinisch elektrischen Geräte. Teil 1: Allgemeine Festlegungen für die Sicherheit. Es gilt die so genannte "DOPPELTE ISOLIERUNG oder VERSTÄRKTE ISOLIERUNG".Da liest man auf Seite 44, dass die Prüfspannung 4000 V_rms (1 Minute) beträgt. Dies gilt für einen Spannungsbereich zwischen 150 V_rms und 250 V_rms. Auf der Titelseite des HCNR200-Datenblattes liest man sogar 5000 V_rms (1 Minute). Wenn es um diese Prüfspannung geht, ist der HCNR200 schon mal auf der sicheren Seite.
Wie aber sieht es mit der Kriech- und Luftstrecke aus? Auf Seite 82 gibt eine Tabelle Auskunft. Für maximal 250 V_rms gilt eine Luftstrecke von 5 mm und eine Kriechstrecke von 8 mm. Man betrachte dazu das HCNR200-Datenblatt auf Seite 3 mit den Skizzen des Dual-Inline-IC-Gehäuse. Der Abstand zwischen den beiden Anschlussreihen in der Nähe des Gehäuses beträgt knapp etwas mehr als 9 mm. Die kürzere seitliche Distanz zwischen den Anschlussreihen und dem IC-Boden beträgt auf jeder Seite etwa 1.5 mm. Diese beiden Seitendistanzen plus die 9 mm betragen 12 mm. Die Bedingung von 8 mm ist daher mehr als erfüllt. Wie aber sieht es auf dem Print mit den Lötaugen aus? Der Abstand zwischen den beiden Anschlussreihen beträgt 10.16 mm. Um den erforderten Limit von 8 mm nicht zu unterschreiten, dürfen die Lötaugen einen Durchmesser von maximal 2 mm haben. So wird die Forderung des SEV eingehalten. Kleiner Tipp: Um die Kriechstrecke zu erhöhen, kann man in der Printplatte unterhalb des HCNR200 einen Schlitz parallel zu den beiden Anschlussreihen einfräsen.
KEINE GARANTIE! Es macht auf mich den Eindruck, dass die Bezeichnung Medical unter Applications auf der Titelseite des HCNR200-Datenblattes berechtigt ist. Ich denke, ausschlaggebend ist:
"UL 1577 recognized (5 kV rms/1 min rating)" und die mechanischen Abmessungen betreffs Luft- und Kriechstrecke. Trotzdem kann ich nicht garantieren, dass die Angaben hier sicher fehlerfrei sind. Es kann auch national bedingte Ungereimtheiten geben, die man berücksichtigen muss. Deshalb, jeder Benutzer dieses Elektronik-Minikurses ist selbstverantwortlich, wenn man die Schaltungen realisiert und einsetzt. Man muss selbst auch die geltenden gesetzlichen Bestimmungen studieren! Dieses Kapitel "Sicherheit" dient einfach nur als die von mir selbst evaluierten Richtlinien. Die Sicherheitsangaben in diesem Elektronik-Minikurs haben keine Rechtsgültigkeit!
EMail-Kontakt mit AVAGO: Ich hatte zu dieser Sicherheits-Thematik ein EMail-Wechsel mit AVAGO. Daraus ergab sich in der letzten EMail von der Geschäftsleitung an mich ein offizielles Statement. Man erlaubte mir, dieses hier zu publizieren:
6. Ausblick, digitale Systeme
Der praktische Einsatz des vorgestellten Isolationsverstärker in Bild 6 und 7 eignet sich vor allem für die Reparatur und Erweiterung (Anzahl Kanäle) von bestehenden EMG-Mess-Systemen. Für Neuentwicklungen? Ja für den Experimentier- und Forschungsbereich (Einzelanfertigung), aber kaum für eine Serienproduktion. Da ist es doch wesentlich preiswerter nur das Nötigste in analoger Schaltungstechnik zu realisieren und der ganz grosse Rest digital mit Signalprozessoren zu verarbeiten. Für die galvanisch isolierenden Schnittstellen kämen einfache, aber ebenso hochisolierende digitale Optokoppler zur Anwendung, die natürlich die selben SEV-Kriterien (für CH) einhalten müssen, wie im vorherigen Kapitel beschrieben für den HCNR200. Die VDE-Richtlinien (für D) werden sich kaum signifikant von den SEV-Richtlinien unterscheiden. Wirklich beurteilen kann ich dies allerdings nicht.